





Ver Vídeos


AUTONOMOUS MOBILE ROBOT

What is AMR?
An AMR is a fully autonomous mobile robot that transports safely material in manufacturing and logistic environments.
How does it work?
The Omron robot uses a built-in laser to scan the environment and generate a map that it will use for navigation. This navigation map is edited to add pickup and drop-off points.
Why AMR Omron?
- It does not require any factory modifications (it is not an AGV).
- It is collaborative – It avoids people .
- It creates alternative routes through an obstacle.
- It adapts to changing surroundings without manual intervention.
- It can be installed quickly – Automatic mapping.
- It works in a coordinated and optimal way with equipment from its own fleet.
- It increases performance, elimintaes errors and improves the traceability of materials.
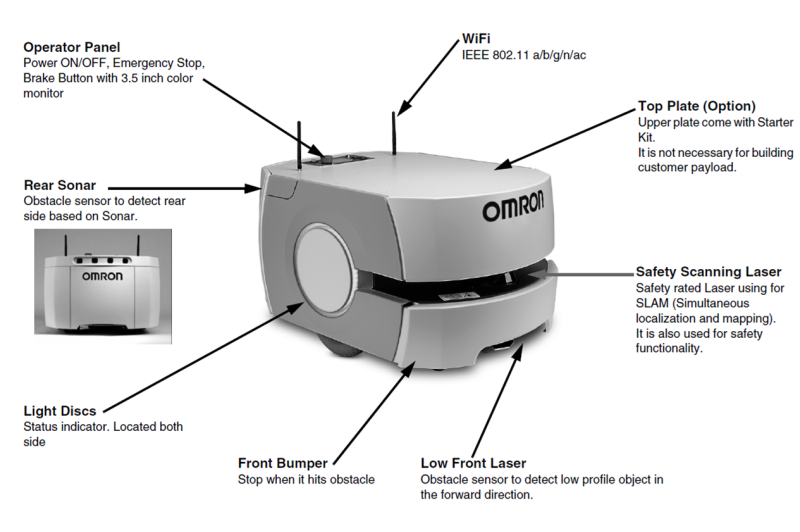
Security
Designed to meet the industry’s latest requirements, our mobile robots interact with people to promote a collaborative, safe working environment. Safety lasers and sonar allow our robots to detect obstacles in their path and prevent collisions.
Additional E-stops can be easily added.
Products

Cell Alignment Positioning Sytem (CAPS)
CAPS technology utilizes the main safety scanning laser to detect a target in the environment and enables the Robot to drive to the desired location with unrivaled precision.
OMRON’s mobile robots can dock to a machine with high accuracy. It can also approach from any angle so that customers do not need to worry about floor layout, nor the shape of the load.
Fleet management for mobile robots: Omron Enterprise Manager
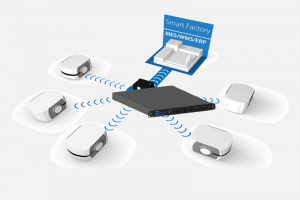
Omron enterprise manager is our intelligent fleet management system for mobile robots. It continuously monitors and coordinates fleets up to 100 robots in warehouses and factory floors. – traffic control – intelligent job assignment – charge management – easy integration with IT – automatic updates – it enables robots to collaborate as a team
![]()